Is your multi-axis system's precision being undermined by a component no larger than a standard coffee mug? You likely recognise that even a high-end industrial robot is only as dependable as its rotary connections. When signal noise disrupts your Ethernet or PROFINET communication, or mechanical fatigue causes a failure in a confined joint, the resulting production halt is both expensive and avoidable.
Selecting the right slip ring for robotic arm integration requires a precise balance of electrical specifications and physical durability. This technical guide explains how to specify the ideal rotary connector to ensure signal integrity and mechanical reliability in professional robotic systems. You'll learn how to identify configurations that offer a compact mechanical footprint while supporting the high-speed data transmission required for modern sensors. We also outline the pathways to achieving zero-maintenance operation in even the most demanding Australian industrial environments, ensuring your hardware meets the updated ISO 10218:2025 safety standards.
Key Takeaways
- Understand how a slip ring for robotic arm applications eliminates cable winding and fatigue to facilitate continuous 360-degree rotation.
- Discover the technical specifications required to maintain signal integrity for high-speed data protocols like PROFINET and EtherCAT.
- Learn how to evaluate through-bore versus capsule designs to balance circuit counts with the physical constraints of robotic joints.
- Identify the necessary IP ratings and thermal management strategies to ensure hardware longevity within challenging Australian operating conditions.
- Establish the critical data points needed for a professional technical audit to ensure your rotary connector matches your specific application requirements.
The Role of Slip Rings in Modern Robotic Arm Design
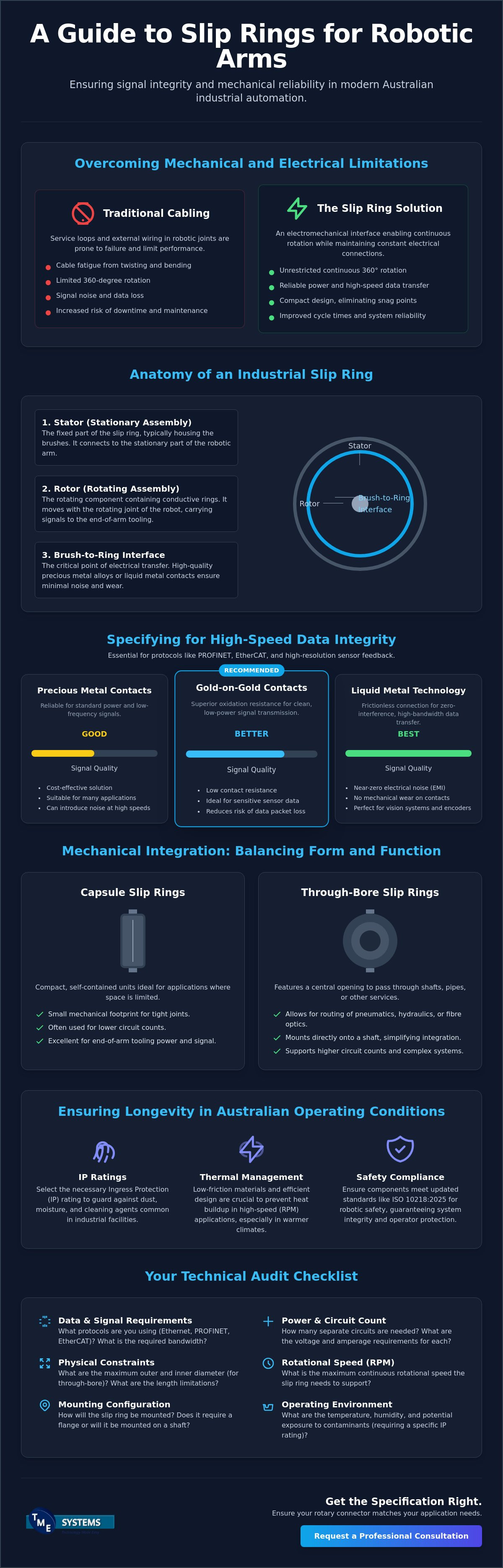
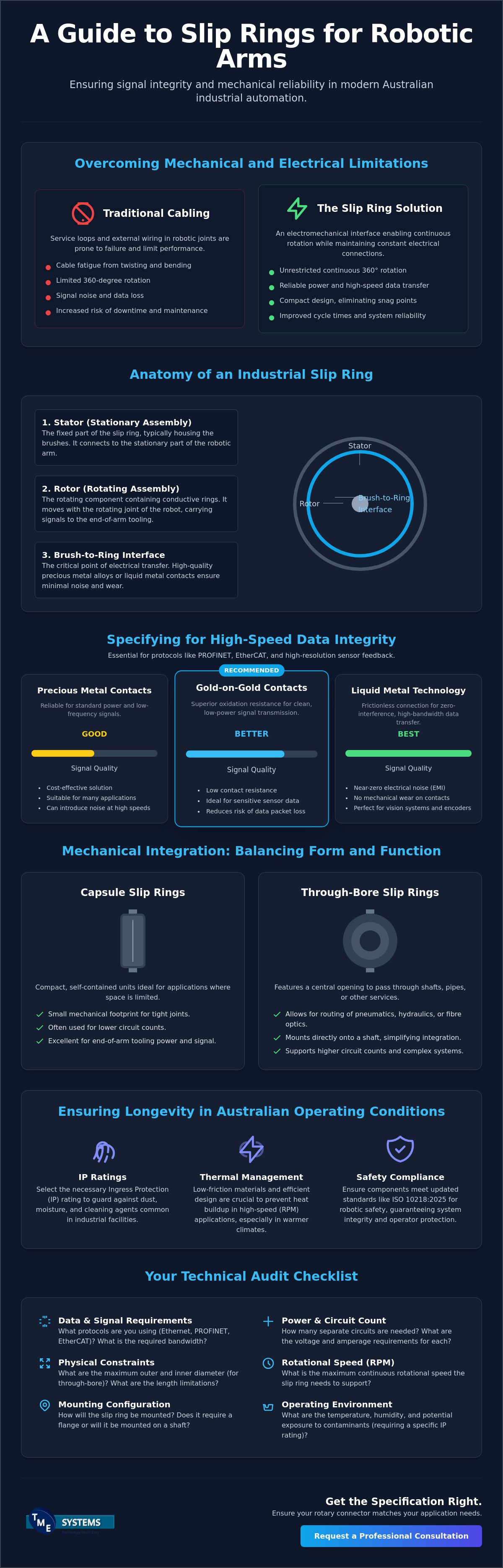
Modern industrial automation demands high levels of agility and precision. In any multi-axis system, the joint represents the most vulnerable point for electrical failure. A slip ring for robotic arm applications acts as the critical electromechanical interface, allowing for unrestricted 360-degree rotation while maintaining a constant electrical connection. Without this component, the arm would be tethered by its own wiring, which severely limits its operational range and movement patterns.
By facilitating continuous rotation, these rotary connectors enable a steady flow of power and high-speed data to the end-of-arm tooling (EOAT). Whether the robot is performing high-speed pick-and-place tasks or intricate assembly, the slip ring ensures that sensor feedback and motor control signals remain uninterrupted. This capability directly improves cycle times and significantly reduces the risk of unplanned downtime caused by cable-related faults. In a professional setting, the goal is to create a system where the mechanical motion does not dictate the electrical reliability.
Overcoming the Limitations of Traditional Cabling
Traditional cabling setups often rely on "service loops," which are extra lengths of wire designed to accommodate joint movement. However, in an articulated robotic joint, this leads to constant mechanical stress and torsional fatigue. Cables eventually fray or snap, leading to intermittent signal loss or complete power failure. In applications such as robotic screwdriving or welding, where the tool must rotate multiple times in the same direction, service loops are a sub-optimal design choice. They add unnecessary bulk and create potential snag points. A dedicated rotary joint eliminates these issues by housing the electrical paths within a protected, rotating assembly, allowing for a more compact and reliable mechanical architecture.
Key Components of an Industrial Robotic Slip Ring
An industrial-grade slip ring consists of two primary assemblies: the stationary stator and the rotating rotor. The internal configuration is designed to manage the physical realities of continuous motion without compromising the electrical circuit.
- The Brush-to-Ring Interface: This is the point of electrical transfer. High-quality systems use precision brushes made of precious metal alloys or composite materials to minimise electrical noise and physical wear.
- Stationary and Rotating Assemblies: These components are engineered to align perfectly within the robot's joint, ensuring that the electrical path remains closed regardless of the arm's position or speed.
- Low-Friction Materials: For high-speed robotic operation, low-friction bearings and contact materials are essential. They prevent heat buildup and ensure that the torque required to rotate the joint remains within the motor's specified limits.
By choosing a component that prioritises these mechanical properties, engineers can ensure that the slip ring for robotic arm integration supports long-term reliability rather than becoming a frequent maintenance point.
Specifying for Signal Integrity: Ethernet and High-Speed Data
Maintaining signal integrity in a slip ring for robotic arm integration is a primary challenge for automation engineers. Modern industrial protocols like PROFINET, EtherCAT, and Ethernet require stable, high-bandwidth connections. However, traditional mechanical contacts often introduce electrical noise (EMI) during rotation, which can lead to data packet loss or sensor feedback errors. This interference is particularly problematic for high-resolution encoders and vision systems that rely on clean, instantaneous data.
When comparing contact materials, gold-on-gold interfaces are common for low-power signal transmission due to their oxidation resistance. While effective for many standard applications, they still rely on physical friction. In contrast, advanced liquid metal rotary joint technology uses a pool of conductive liquid to maintain the connection. This innovative approach eliminates the mechanical wear and contact resistance fluctuations found in traditional brush-based systems. The result is a near-zero interference connection that is ideal for high-speed data. The reliability of these rotary interfaces is a cornerstone of advanced robotics, a concept explored in technical reviews of NASA's robotic arm applications regarding joint feedback loops.
Minimising Signal Noise in Precision Automation
Rotary contact resistance can create electrical jitter; this disrupts the timing of sensitive digital signals. To combat this, shielding is required for robotic feedback circuits to isolate them from external EMI. For data-heavy applications, industry experts in Australia frequently recommend advanced liquid metal interfaces because they provide a constant, low-resistance path that traditional brushes cannot match. This ensures that the control system receives accurate data without the need for error-correction overhead that slows down cycle times.
Handling Power and Data in a Single Assembly
Combining power and data in one slip ring for robotic arm assembly requires strict physical separation. If signal wires are too close to high-current motor leads, cross-talk can occur, corrupting the data. Designers must specify circuit counts that allow for adequate spacing and shielding between these different circuit types. You must also account for voltage drop in high-current robotic motors, as excessive resistance in the rotary joint can reduce motor torque and efficiency. For specific project requirements, our team provides technical application consulting to help match the right technology to your data needs.
Mechanical Integration: Size, Mounting, and RPM Constraints
Integrating a slip ring for robotic arm systems requires a careful assessment of mechanical trade-offs. The primary challenge lies in balancing the required circuit count with the physical dimensions of the robot joint. As the number of circuits increases, the unit typically grows in either diameter or length. Engineers must establish a clear hierarchy of needs: is a slim profile more critical than a high circuit count? For instance, a complex end-effector might require 24 circuits for power and signal, but a standard capsule design might only accommodate 12 within a 22mm diameter. In such cases, selecting a high-density configuration from manufacturers like Prosper Rotation becomes essential to avoid redesigning the entire arm architecture.
Rotational speed is another critical constraint. High-speed pick-and-place applications often operate at several hundred RPM. You must ensure the chosen rotary connector is rated for these continuous speeds to prevent premature wear. Additionally, rotational drag or torque must be kept to a minimum. If the slip ring requires too much force to turn, it can strain low-power robotic motors, leading to overheating or reduced accuracy. A technical audit should always include the starting and operating torque specifications to ensure compatibility with the robot's drive system.
Mounting Styles for Robotic Joints
The choice between mounting styles depends on the robot's internal layout. Flange mounting is the most common method for securing the unit to rotating plates, providing a stable mechanical connection that handles vibration well. However, many modern designs require a through-bore slip ring. This hollow-centre architecture allows for the passage of hydraulic lines, pneumatic tubes, or even a drive shaft through the middle of the electrical assembly. For miniature robotic arms or collaborative robots (cobots) where space is at a premium, compact capsule designs offer a self-contained solution that fits into tight elbows or wrists without requiring extensive custom housing.
Weight and Inertia Considerations
Every gram added to a robotic joint affects the overall payload capacity. While a single slip ring for robotic arm integration may seem light, its weight is magnified when placed at the end of a long reach. Choosing lightweight housing materials, such as anodised aluminium or high-grade polymers, helps maximise the robot's lifting potential. Beyond static weight, rotational inertia is a vital factor in high-performance automation. A heavy rotating mass requires more energy to start and stop, which can hinder the robot's ability to achieve fast acceleration and precise braking. By specifying low-inertia components, you ensure the system maintains its dynamic responsiveness and precision during rapid movements.
Environmental Resilience and Longevity in Australia
Australia's industrial landscape presents unique challenges for automation hardware. High ambient temperatures, fine mineral dust, and corrosive environments can quickly degrade a standard slip ring for robotic arm assembly. When hardware is installed in mining, agriculture, or heavy manufacturing, environmental resilience is as critical as electrical performance. Specifying high Ingress Protection (IP) ratings is the first step in ensuring longevity. For robots operating in wash-down areas or dusty workshops, IP65 or IP67 ratings are essential. These ratings confirm the unit is dust-tight and protected against water jets or temporary immersion, preventing contaminants from reaching the internal contacts.
Heat dissipation is another vital factor in continuous-duty robotic cycles. Friction within the rotary joint generates thermal energy. When combined with Australian summer temperatures that often exceed 40°C in unconditioned facilities, this can lead to lubricant breakdown or accelerated contact wear. Maintenance-free designs are preferred because robot joints are often difficult to access. A failure in a primary joint can result in hours of disassembly. By selecting components designed for these conditions, you reduce the risk of unplanned downtime and extend the service life of the entire robotic system.
Sealing Against Dust and Moisture
Protecting internal contacts from workshop debris, metal shavings, and coolants is a priority for any automated cell. BGB Innovation designs address these needs through heavy-duty industrial sealing that maintains a barrier against external particulates. In many Australian applications, fine dust can act as an abrasive, quickly wearing down traditional brush interfaces. Effective sealing ensures that the internal environment remains clean, which is vital for maintaining the low contact resistance required for sensitive data signals. If you are operating in a particularly harsh environment, request a technical consultation to determine the appropriate sealing level for your specific site conditions.
Maintenance and Service Life
Estimating the rotational life of a slip ring for robotic arm integration is measured in millions of revolutions. Traditional brush-based systems require periodic inspection for wear and debris accumulation. However, Meridian Laboratory offers brushless technology that significantly reduces these requirements. By eliminating the physical friction of a sliding brush, these units provide a much longer service life and more stable electrical performance over time. Predictive maintenance involves recognising the signs of contact wear, such as increased electrical noise or changes in rotational torque. Transitioning to brushless or liquid metal technology often allows for a "fit and forget" approach, which is the desired outcome for any high-availability production line.
Consultative Selection: Getting the Specification Right
Selecting a slip ring for robotic arm deployment is an engineering decision rather than a simple procurement task. A thorough technical audit is essential because off-the-shelf components rarely meet the exact combination of torque, signal integrity, and physical dimensions required for custom automation. By identifying potential bottlenecks early, you avoid the high costs of system redesign or premature component failure. This consultative approach ensures that the chosen hardware is compatible with the robot's drive system and the specific environmental variables of your facility.
Choosing established brands like Prosper Rotation provides a foundation of reliability. These manufacturers have a proven track record in high-cycle robotic applications where consistency is paramount. However, the hardware is only half the equation. Navigating the complexities of multi-axis movement requires a deep understanding of how electrical and mechanical properties interact under continuous rotation. This is where professional guidance becomes invaluable for Australian engineering teams seeking to optimise their systems.
The Technical Selection Checklist
To ensure a successful integration, you must provide your supplier with a detailed dataset. A precise specification prevents signal degradation and mechanical interference. Your checklist should include the following parameters:
- Circuit Requirements: Define the total circuit count, clearly distinguishing between high-current power leads and sensitive signal lines.
- Electrical Loads: Confirm the peak current and operating voltage for each circuit to prevent overheating and ensure safety compliance.
- Mechanical Envelope: Detail the maximum diameter and length allowed within the robot joint, including mounting tolerances and space for cable entry.
- Signal Protocols: Identify specific protocols such as USB 3.0, HDMI, or high-speed Ethernet, which dictate the shielding and contact technology required.
- Rotational Dynamics: Specify the required RPM and the maximum allowable torque to ensure the slip ring for robotic arm integration does not strain the joint motors.
Partnering for Engineering Success
The value of local technical support and application engineering cannot be overstated. Accessing global brands through an Australian distributor provides the benefit of local accountability and faster technical response times. TME Systems Pty Ltd assists in matching specific hardware to your robotic requirements, ensuring that every parameter is verified before procurement. This partnership bridges the gap between complex manufacturing capabilities and your specific end-user needs. For tailored assistance with your next project, you can contact TME Systems Pty Ltd for a technical consultation to ensure your system achieves maximum reliability and performance.
Securing Long-Term Performance in Automated Systems
Securing high performance in robotics requires more than just high-quality hardware; it involves synchronising mechanical durability with electrical precision. Throughout this guide, we have explored how selecting the right slip ring for robotic arm systems involves balancing signal integrity for high-speed protocols against the physical constraints of articulated joints. By integrating advanced sealing and low-friction contact technologies, you ensure that your automation infrastructure remains resilient against the unique environmental demands of Australian industry.
As an authorised distributor for Mercotac and Meridian Laboratory, TME Systems Pty Ltd provides the specialised expertise needed to specify low-noise rotary connectors for complex systems. Our Australian-based technical application consulting is designed to help you navigate the transition from initial design to successful deployment. Enquire about specialised robotic slip rings at TME Systems Pty Ltd to ensure your next project benefits from precision engineering and long-term mechanical reliability.
Frequently Asked Questions
Can a slip ring handle high-speed Ethernet for a robotic camera?
Yes, specialised rotary connectors can handle high-speed Ethernet for vision systems. You must specify a unit designed for 1000Base-T or higher to maintain signal integrity during continuous rotation. These units use precision shielding and low-resistance contacts to prevent packet loss. Without these features, the electrical noise from rotation will disrupt the camera feed, leading to frame drops or complete signal loss in your robotic cell.
What is the difference between a capsule and a through-bore slip ring?
The primary difference lies in the mechanical configuration and mounting style. A capsule slip ring is a compact, self-contained unit ideal for tight spaces like a robot's wrist. A through-bore slip ring features a hollow centre, allowing you to pass hydraulic lines, pneumatic hoses, or a drive shaft through the middle of the electrical assembly. This makes through-bore designs better suited for primary robot joints where central clearance is required.
How long do industrial robotic slip rings typically last?
Industrial-grade units are typically rated for 10 million to 100 million revolutions depending on the contact technology. Brushless designs or liquid metal interfaces generally offer a longer service life than traditional carbon brush types. Factors such as operating RPM, ambient temperature, and duty cycle will significantly influence the actual longevity of a slip ring for robotic arm integration in your facility.
Are there mercury-free options for food-grade robotic applications?
Yes, there are several mercury-free alternatives for food-grade or medical robotic applications. While liquid metal designs often use a gallium alloy, traditional gold-on-gold contact rings or brushless electronic variants are the standard for environments where mercury is prohibited. These designs provide high conductivity and reliability without the risk of contamination, ensuring compliance with Australian food safety regulations and industry standards.
How do I reduce electrical noise in my rotary connection?
Reducing electrical noise requires a combination of high-quality contact materials and proper circuit isolation. You should select a slip ring for robotic arm use that features precious metal or liquid metal contacts to minimise resistance fluctuations. Additionally, ensure that signal circuits are physically separated from high-current power lines within the assembly and utilise twisted-pair, shielded cabling to block external electromagnetic interference (EMI).
What maintenance is required for a robotic slip ring?
Maintenance requirements are determined by the internal contact technology. Traditional brush-style units require periodic inspection for dust accumulation and contact wear to prevent signal degradation. In contrast, brushless and liquid metal designs are essentially maintenance-free over their rated lifespan. We recommend a regular technical audit of your robotic joints to check for changes in rotational torque or electrical resistance, which can signal impending wear.
Can I transmit both power and signal through the same slip ring?
You can transmit both power and signal through a single hybrid assembly. These units are engineered with internal barriers to prevent high-voltage power lines from interfering with sensitive low-voltage data signals. When specifying a hybrid unit, it's vital to define the circuit count and current ratings for each path to ensure the internal insulation and shielding are sufficient for your specific end-of-arm tooling requirements.
What IP rating do I need for a robotic arm in a dusty environment?
For a robotic arm operating in a dusty Australian workshop, you should specify a minimum of an IP65 rating. This ensures the unit is dust-tight and protected against water jets. If the environment involves heavy moisture or the risk of temporary immersion, an IP67 rating is more appropriate. High IP ratings prevent fine particulates from entering the housing and causing abrasive wear on the internal electrical contacts.